
 Contacte
Contacte




Autor: Dr. Joan Nunes. Universitat Autònoma de Barcelona
Promotor: Institut Cartogràfic de Catalunya, 2013
Un SIG tridimensional és un sistema d’informació geogràfica capaç d'emmagatzemar i de tractar informació geoespacial que conté representacions en tres dimensions de fenòmens geogràfics, ja sigui segons un model de dades vectorial o un model de dades ràster.
La gran majoria de les aplicacions dels sistemes d’informació geogràfica utilitzen i es resolen satisfactòriament representacions bidimensionals dels fenòmens geogràfics, heretades en gran part de la cartografia convencional. En aquestes aplicacions la dimensió vertical s'omet o, en tot cas, es tracta com un atribut temàtic d'elements o posicions definides en el pla de dues dimensions. Tanmateix hi ha un cert nombre de camps d'aplicació que requereixen la representació espacial genuïna de la tercera dimensió per tal de representar com a tals objectes o fenòmens per sobre de la superfície del terreny o dins del subsòl, dels oceans o de l'atmosfera. Entre aquests camps d'aplicació destaquen la geologia, l'hidrogeologia, l'arqueologia, la planificació urbana, l'oceanografia i la meteorologia.
A partir de la dècada de 1990 i sobretot des de mitjans de la dècada de 2000, gràcies a les millores de maquinari i de programari, han proliferat els sistemes d’informació geogràfica i altres tipus de programari que permeten la visualització 3D d'informació geoespacial. En aquest sentit, han esdevingut força populars les formes de visualització 3D de la ciutat i també, en menor grau, del paisatge en general, en forma d'escenes tridimensionals o bé de globus virtuals.
Més enllà de la visualització 3D, el progrés dels SIG tridimensionals, amb capacitat de manejar veritables representacions tridimensionals i de permetre'n la interrogació i les operacions d'anàlisi, és força més lenta i tot just en els darrers anys ha començat a aparèixer programari de SIG tridimensional amb certa capacitat operativa.
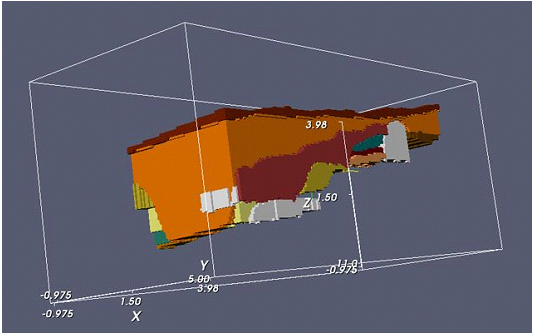
Exemple de SIG tridimensional: representació 3D de l'estratigrafia arqueològica. Font: http://undine-lieberwirth.info/
Sumari:
Origen
Els SIG tridimensionals tenen l'origen, tant pel que fa als mètodes de representació 3D com a les tècniques de visualització, en els sistemes de disseny assistit per ordinador (CAD) (Requicha, 1980) i en els sistemes gràfics de renderització de sòlids (Pixar, 1988). Tradicionalment, els sistemes d’informació geogràfica, pel seu origen en l'automatització de la cartografia, es desenvoluparen estrictament i de forma exclusiva basant-se en representacions bidimensionals. A partir de finals de la dècada de 1980, començaren a aparèixer les primeres aplicacions de SIG tridimensionals en camps com l'exploració petroliera (Youngmann, 1989), mineria (Bak and Mill, 1989), meteorologia (Slingerland and Keen, 1990), hidrogeologia (Turner, 1989), geologia (Kelk, 1991), enginyeria civil (Petrie and Kennie, 1990) o arquitectura del paisatge (Batten, 1989). És a partir d'aquest moment que l'interès pels SIG tridimensionals aniria creixen i esdevindria un camp de recerca diferenciat (Raper, 1989).
Definició
El concepte de SIG tridimensional designa pròpiament els sistemes d’informació geogràfica que són capaços de generar i manejar representacions tridimensionals genuïnes d'objectes que constitueixen volums en l'espai de tres dimensions. En particular, els SIG tridimensionals són sistemes amb capacitat d'estructurar i emmagatzemar les representacions tridimensionals i de proporcionar operacions de consulta i d'anàlisi de les representacions tridimensionals.
Les principals dificultats a resoldre per a desenvolupar sistemes d’informació geogràfica tridimensionals són la pròpia representació 3D, mitjançant models i estructures de dades eficients, l'emmagatzematge de les representacions 3D en bases de dades i el desenvolupament d'operacions d'anàlisi entre objectes 3D, com és ara la selecció espacial, la intersecció o l'àrea d'influència, equivalents a les operacions clàssiques de geoprocessament dels sistemes d’informació geogràfica bidimensionals.
Representació 2,5D
S'entén per representació 2,5D la representació d'objectes bidimensionals (polígons i superfícies) o de dimensió inferior (línies i punts) en l'espai de tres dimensions. En la representació 2,5D els objectes es poden ubicar en l'espai de tres dimensions, gràcies al fet que els punts que defineixen les formes dels objectes disposen de les tres coordenades x, y i z, però els objectes en si són bidimensionals.
La representació 2,5D inclou també la representació de superfícies, com és ara els models digitals d'elevacions, en forma de superfícies funcionals. És a dir, amb un sol valor de z per a cada posició x,y del pla, o el que és el mateix amb el valor de z com a atribut de la posició. Això permet representar superfícies bidimensionals, com a pell o embolcall, en l'espai de tres dimensions, però amb la limitació de ser necessàriament superfícies obertes, que no permeten delimitar un volum interior, per la qual cosa no són aptes com a representació tridimensional. De fet, la limitació de ser superfícies funcionals no permet ni tan sols representar adequadament la superfície externa del relleu, ja que el fet de no admetre més que un sol valor d'altitud (z) per a cada posició no permet representar formes del relleu singulars com és ara cingles verticals, balmes o plecs, encara que generalment passen inadvertits excepte en models digitals d'elevacions de molt alta resolució.
La representació 2,5D permet la visualització en perspectiva tridimensional de la superfície del terreny, així com de la informació geoespacial que disposa de coordenades en tres dimensions, i per tant permet visualitzar la posició i la forma en perspectiva d'objectes bidimensionals (punts, línies i polígons o altres superfícies) per sobre o per sota de la superfície del relleu en la seva altitud o profunditat correcta. Tot i no ser una veritable visualització tridimensional, la visualització en perspectiva tridimensional, els anomenats blocs diagrama, constitueixen la forma de visualització 3D més habitual, donat que els suports físics de visualització (pantalles, còpies impreses) són bidimensionals.
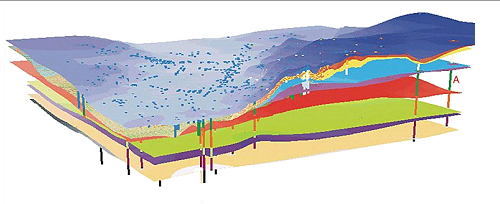
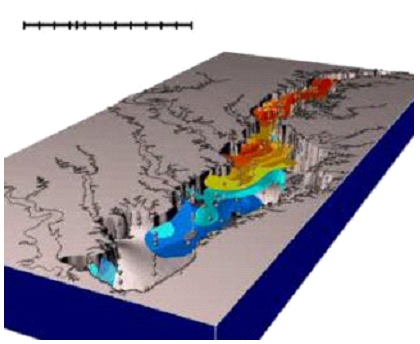
Exemple de representació 2,5D de l'estratigrafia geològica: els diferents estrats es representen per la seva superfície superior, a la profunditat correcta, però no és possible representar el volum dels estrats.
Font: http://www.esri.com/news/arcnews/winter0506articles/subsurface-geology.html
Fins a mitjans de la dècada de 1990 la representació de superfícies funcionals, com els models digitals d'elevacions, foren pràcticament l'única forma de representació 2,5D admesa en els sistemes d’informació geogràfica, ja que la representació de tota la resta d'informació geoespacial era, com la cartografia, estrictament bidimensional. A partir de finals de la dècada de 1990, però, la majoria del programari de SIG adoptà formats i estructures de dades vectorials que permeten emmagatzemar i utilitzar, bàsicament per a visualització o interpolació, les tres coordenades x, y i z dels punts de tots els elements, tal com ja era comú en els programes de CAD des de finals de la dècada de 1980.
Representació 3D
La veritable representació 3D és la que permet representar, donar identitat i operar amb objectes tridimensionals, és a dir, cossos o volums. La representació 3D s'obté principalment per mitjà de la representació de sòlids. No obstant, la representació 3D inclou també la representació de superfícies 3D genuïnes, ja sigui per l'interès de les superfícies en si, o bé com a mitjà per a representar sòlids a través de la superfície que els delimita.
Representació 3D de superfícies
La representació de superfícies és sempre una representació de la forma bidimensional que constitueix la pell o embolcall d'un objecte, si la superfície és tancada, o, en general, una representació d'una capa sense gruix que pren formes en l'espai de tres dimensions. A diferència de la representació 2,5D de superfícies funcionals, la representació 3D de superfícies ha de permetre representar superfícies amb més d'un valor de superfície (z) per a cada posició de coordenades x i y, de manera que es puguin obtenir superfícies plegades sobre si mateixes i, eventualment tancades.
Un dels mètodes més emprats en informàtica gràfica per a representar superfícies tridimensionals són els b-splines racionals no uniformes (NURBS, de l'anglès non-uniform rational basis spline). Els NURBS són un model matemàtic per a generar i representar corbes i superfícies molt precís i flexible, ja que permet manejar i combinar formes analítiques (definides mitjançant fórmules paramètriques) i formes lliures modelitzades interactivament. Un NURBS es defineix per l'ordre (nombre de punts de control), un conjunt de punts de control ponderats i un vector de connexions (els punts on té lloc l'empalmament de les diferents parts de l'spline tot mantenint la continuïtat de la curvatura. Els NURBS són una generalització dels b-splines (splines de base) i de les corbes i superfícies de Bézier, amb la diferència que els punts de control són ponderats individualment per pesos diferents.
El desenvolupament dels NURBS s'inicià a la dècada de 1950 en enginyeria mecànica per la necessitat de disposar de representacions matemàtiques precises de superfícies de formes lliures com les dels cascs dels vaixells, els fuselatges dels avions o les carrosseries dels automòbils, de manera que es poguessin dissenyar i reproduir a voluntat sense haver de recórrer a models físics a escala. Inicialment els NURBS només estaven disponibles en programes de disseny propietat dels fabricants de cotxes o avions. Durant la dècada de 1980 s'anaren incorporant progressivament als programes genèrics de CAD i de renderització i animació de sòlids 3D, i a principis de la dècada de 1990 aparegueren els primers casos de NURBS aplicats a la representació 3D d'informació geoespacial, particularment en mineria (Fisher and Wales, 1991) i geologia (Kelk and Challen, 1990). Els NURBS, com els splines en el cas de formes bidimensionals, són particularment apropiats per a modelitzar formes tridimensionals dels fenòmens geogràfics, ja que la complexitat de les formes naturals no es pot reproduir mitjançant fórmules analítiques, mentre que l'aproximació per trossos dels splines permet una gran precisió i adaptació a les formes més complexes tot mantenint la continuïtat.
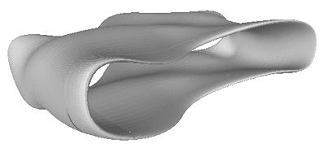
Exemple de representació 3D de superfícies per mitjà de NURBS: superfície tridimensional amb plecs, no limitada pel principi de superfície funcional.
Font: http://michalpiasecki.com/2009/10/26/nurbs-surface-in-processing/
La principal finalitat de la representació 3D de superfícies és la representació de l'embolcall exterior dels sòlids o volums que constitueixen pròpiament l'objecte de la representació 3D. La definició de formes tancades es pot aconseguir mitjançant models de superfícies tancades o, més sovint, donada la complexitat de les formes a representar en el cas de la informació geogràfica, per mitjà de la combinació de diverses superfícies que conjuntament defineixen l'embolcall tancat d'un sòlid, el qual delimita un volum interior respecte de l'espai exterior. La combinació de superfícies per a crear la representació 3D de sòlids es pot realitzar a partir de qualsevol tipus de superfícies, incloses les superfícies funcionals, però els NURBS són especialment adequats ja que es poden combinar entre si NURBS de diferents formes per mitjà d'altres NURBS que fan d'empalmament.
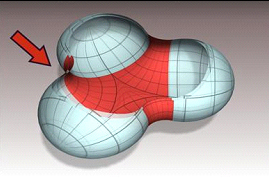
Exemple de combinació de NURBS per a crear la representació 3D de sòlids.
Font: http://www.3dmax-tutorials.com/Multisided_Blend_Surface.html
La representació 3D de sòlids és l'objecte pròpiament dit de la representació tridimensional. El fet de poder diferenciar, identificar i operar entre si cossos o volums. La representació 3D de sòlids en els SIG tridimensionals es basa en la modelització geomètrica de sòlids, que és el conjunt de principis i mètodes matemàtics emprats en informàtica gràfica, i en particular en disseny assistit per ordinador (CAD), per a la creació, visualització, animació, interrogació i manipulació de models digitals d'objectes físics.
Hi ha un bon nombre de mètodes per a la representació 3D de sòlids (Mäntyla, 1988). Les tècniques emprades en la representació 3D de sòlids en els SIG tridimensionals són extensions de les tècniques genèriques de modelització geomètrica de sòlids, amb requeriments específics derivats d'algunes particularitats de les dades geoespacials, entre les quals el maneig de grans volums de dades, la complexitat de formes i de configuracions espacials, la incertesa dels fenòmens geogràfics, la necessitat d'interpretació per a la modelització conceptual dels fenòmens, la vinculació d'atributs, el desenvolupament d'operacions topològiques de selecció i intersecció en tres dimensions per a l'anàlisi geoespacial de les dades 3D i la necessitat de múltiples representacions o de representacions amb múltiples resolucions.
Les diverses tècniques de modelització de sòlids es poden classificar en tres grans tipus segons el principi o aproximació bàsica emprada per a la modelització dels cossos: tècniques constructives, tècniques basades en l'embolcall i tècniques basades en la descomposició de volums (Requicha and Rossignac, 1992). De fet, però, donat que les tècniques de tipus constructiu també modelitzen els objectes sòlids per mitjà de l'embolcall, els tipus de tècniques de modelització de sòlids es poden reduir a dos, tècniques basades en l'embolcall (és a dir, per mitjà de superfícies) i tècniques basades en la descomposició de volums (Raper and Kelk, 1991), de fort paral·lelisme amb els models de dades vectorial i ràster, respectivament; o a tres tipus de tècniques si es consideren un tipus a part les tècniques híbrides que combinen aspectes dels dos tipus bàsics (Raper, 2000).
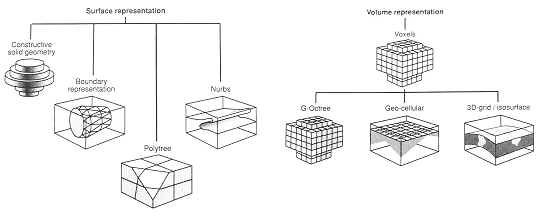
Classificació dels diferents tipus de tècniques de representació 3D de sòlids. Font: Raper and Kelk, 1991.
Entre les tècniques que representen sòlids en tres dimensions mitjançant la superfície de l'embolcall o límit que defineix el cos sòlid, destaquen les següents:
- Geometria sòlida constructiva: aquest mètode es basa en un conjunt de sòlids primitius simples, com per exemple el cub, el cilindre, l'esfera, etc., que es poden especificar en forma paramètrica mitjançant equacions i que, combinats per mitjà d'operadors de conjunts com la intersecció, la unió o la diferència, permeten representar objectes sòlids. Aquest mètode té l'avantatge de ser simple i ràpid en termes computacionals, però té com a principal limitació que els sòlids primitius emprats són massa simples per a modelitzar les formes complexes dels objectes o fenòmens naturals. Resulta més apropiat per a la modelització de peces mecàniques i similars.
- Representació de l'embolcall: les tècniques de representació 3D de sòlids basades en l'embolcall consisteixen a descompondre l'embolcall exterior dels fenòmens a modelitzar en un conjunt de cares planes o de superfícies bidimensionals de qualsevol tipus, que s'ajunten en arestes (línies o corbes unidimensionals), les quals comparteixen vèrtexs o punts d'unió (punts zero-dimensionals). Aquest tipus de representació és l'extensió tridimensional de la representació vectorial bidimensional, que representa les formes per mitjà de les vores. Per tal de ser vàlida i ben formada una representació mitjançant l'embolcall ha de ser tancada, orientable, no intersecar amb si mateixa, i estar delimitada i connectada topològicament, la qual cosa requereix la disponibilitat d'un procés de generació que inclogui procediments automàtics de validació topològica.
En el cas de limitar les cares a facetes planes, les arestes esdevenen segments rectes i el cos resultant és un poliedre. En el cas general, les facetes poden ser superfícies de qualsevol forma i les arestes corbes. El model general preveu la possibilitat de forats o d'altres sòlids continguts dins del sòlid modelitzat, les factes dels quals són discs topològics i les arestes arcs. Les representacions de l'embolcall (boundary representation o B-rep, en anglès) solen utilitzar estructures de dades en forma de grafs jeràrquics que enumeren els punts d'unió, les arestes i les facetes que formen l'embolcall, tot explicitant-ne les interrelacions. Si l'embolcall conté forats o altres sòlids, es requereix un graf per a cada embolcall simple format per un conjunt tancat i connex de facetes, més les relacions de contenció entre els diversos embolcalls.
Una de les representacions d'aquest tipus que ha estat objecte d'implementació operativa és el model de dades multifaceta (multipatch) (ESRI, 2008), que utilitza facetes triangulars, com les xarxes irregulars de triangles, però organitzades en altres construccions per a orientar millor les superfícies, modelitzar l'embolcall exterior dels fenòmens i permetre l'existència de forats. Un objecte multifaceta es defineix com una col·lecció de bandes de triangles, ventalls de triangles, triangles individual o anells que formen una superfície tancada. El model de dades mutifaceta permet, a més, emmagatzemar la textura, color, transparència i il·luminació de cada faceta com a propietats de la faceta, juntament amb la definició geomètrica, de manera que permet generar representacions 3D d'aspecte realista.
- NURBS: és un cas també de representació de l'embolcall, utilitzant però superfícies modelitzades per mitjà de NURBS en totes i cada una de les superfícies que delimiten el sòlid.
Exemple de representació 3D de sòlids amb el model de dades multifaceta. Font: ESRI, 2008.

Les tècniques que representen sòlids en tres dimensions mitjançant la descomposició de volums consisteixen a subdividir l'espai d'interès que conté els sòlids a representar mitjançant un cert nombre de volums elementals, que poden ser llesques horitzontals, primes verticals o, el que és més habitual, primitives elementals de volum com el vòxel o cub elemental, que divideixen l'espai en unitats elementals regulars (cubs) per a cada una de les quals s'enregistra el valor d'un atribut (per exemple, el tipus o identificació d'un estrat). El vòxel constitueix l'equivalent tridimensional del píxel o cel·la ràster bidimensional. La representació per mitjà de vòxels és una de les representacions tridimensionals implementades amb èxit i operatives en un cert nombre de programes de SIG tridimensional (per exemple, Geomedia o GRASS).
La representació per mitjà de vòxels, que forma part dels mètodes anomenats d'enumeració de l'ocupació de l'espai (spatial occupancy enumeration, SOE) és una representació simple i efectiva, però té l'inconvenient de generar conjunts de dades molt voluminosos, per la qual cosa s'han proposat diversos mètodes per reduir el volum de dades. Entre aquets hi ha la topologia discreta tridimensional (three-dimensional discrete topology, 3DDT) consistent a reduir la representació a només els vòxels que formen part dels embolcalls dels diversos sòlids presents a l'espai modelitzat, i que requereix generar els embolcalls i la seva topologia per després "voxelitzar-los" de forma equivalent a la rasterització de polígons vectorials bidimensionals; la indexació i compactació dels vòxels mitjançant arbres octals (octrees), que són l'equivalent tridimensional dels arbres quaternaris emprats per a la indexació de ràsters bidimensionals; i la compactació simple dels vòxels mitjançant la codificació per longitud de recorregut (run-length encoding), emprada també per a la compressió de ràsters bidimensionals.
Exemple de representació 3D de sòlids mitjançant vòxels. Font: http://grass.fbk.eu/screenshots/viz.php
Finalment, entre les tècniques híbrides de representació 3D, destaca la versió modificada de l'arbre octal anomenada polytree, que identifica i enregistra el tipus d'element (punt d'unió, aresta o faceta) de l'embolcall de cada sòlid que conté cada vòxel a més de l'atribut mostrejat i els indexa mitjançant un arbre octal, de forma molt semblant a la representació bidimensional vectorial per mitjà d'elements indexada mitjançant arbres quaternaris. Aquest tipus de mètode híbrid té els avantatges propis tant de les tècniques de representació de l'embolcall com de les de descomposició de volums, ja que conté informació explícita de la representació de l'embolcall i reconeix explícitament objectes, que a més estan indexats espacialment, i d'altra banda té la simplicitat dels vòxels que permeten efectuar operacions espacials de forma ràpida i senzilla, sense l'inconvenient d'haver d'emmagatzemar conjunts de dades tan voluminosos.
Recreació d'objectes 3D
La captació directa de les dades de representacions 3D de sòlids és encara molt limitada. La majoria de representacions 3D s'han de generar a partir de representacions 3D creades amb programes de CAD o, el que és força habitual a partir de representacions 2,5D. Els mètodes emprats depenen de la font de dades emprada en cada cas. Entre els mètodes més emprats hi ha els següents (Stoter and Zlatanova, 2003):
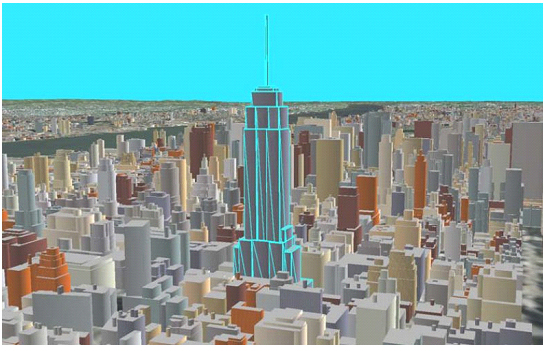
- l'extrusió de formes bidimensionals, a partir de les plantes enregistrades en cartografia bidimensional i de dades d'alçades recollides complementàriament per mitjà de topografia, GPS o fotogrametria. És un dels mètodes més habituals en la representació 3D del medi urbà, donada l'abundància de cartografia bidimensional i la facilitat i rapidesa de les tècniques fotogramètriques basades en fotografia aèria vertical o obliqua.
- l'extrusió inversa, a partir de la fotografia aèria vertical dels terrats i dades d'altitud del terreny, que té l'avantatge de produir representacions més detallades que l'extrusió de les plantes.
- l'ajust de formes 3D, a partir de núvols de punts 3D mesurats mitjançant làser o d'arestes extretes de fotografia aèria. És el mètode que proporciona les representacions 3D més detallades, però és el més complex i costós.
Sovint cal utilitzar combinacions de tots tres mètodes, amb una intervenció manual constant que fa el procés més o menys laboriós en funció del grau de detall a assolir segons els requeriments de l'aplicació a què es destinen les dades. Cada cop més però s'ofereixen solucions de programari semiautomàtic força efectives.

Exemple de recreació d'objectes 3D mitjançant extrusió. Font: http://www.esri.com/mapmuseum/mapbook_gallery/volume24/
Emmagatzematge de representacions 3D
L'emmagatzematge de les representacions 3D és molt diversa, gairebé en tots els casos en formats de propietat dels diferents programes, ja sigui per mitjà de fitxers o de bases de dades. L'ús creixent de bases de dades espacials per a l'emmagatzematge de la informació geoespacial s'aplica també a l'emmagatzematge de representacions 3D però, a diferència de les dades geoespacials bidimensionals, no es disposa d'un model de dades estàndard com el model Simple Feature Access que permeti una implementació unificada i fàcilment ineteroperable i el desenvolupament de llenguatges de consulta de bases de dades per a dades 3D. Entre les implementacions d'emmagatzematge de dades geoespacials 3D en bases de dades espacials, les més habituals són les orientades a objectes però en forma ad hoc, ja que cap de les bases de dades espacials o extensions espacials de gestors de bases de dades han implementat encara objectes 3D dins del seu model de dades de geometria, en bona part per la falta d'especificacions estàndard en aquest sentit.
Una darrera limitació important és la relativa falta d'integració entre els models de dades i emmagatzematge de les representacions 2D o 2,5D i els de les representacions 3D, que donen lloc a funcionalitat separada per a un i altre tipus de dades dins d'un mateix programa i que evolucionen per separat. Alguns autors (Breunig and Zlatanova, 2011) veuen en el desenvolupament de models de dades abstractes que integrin en un únic model de dades tots els tipus de representacions la principal necessitat de recerca per al desenvolupament del SIG 3D en el futur.
Visualització 3D
La visualització 3D, que té com a principals camps d'aplicació la planificació urbana i l'exploració geològica o arqueològica del subsòl, presenta nombrosos aspectes específics, entre els quals la projecció, la llegibilitat de les visualitzacions, la facilitat de navegar a través de les escenes de visualització 3D i el grau de detall i de realisme desitjat de les visualitzacions. Gran part d'aquests aspectes requereixen la utilització de múltiples representacions amb diferents graus de detall que es poden generar prèviament i emmagatzemar de forma permanent o bé generar de forma dinàmica a mesura que les operacions de visualització i navegació (zoom, desplaçament, etc.) ho requereixen. La creació i congruència de les representacions múltiples constitueix en si mateix un problema de generalització força complex. Igualment la producció dinàmica dels diferents aspectes de visualització realista (il·luminació, projecció d'ombres, textures, etc.) presenta una complexitat notable, independentment que es puguin emmagatzemar parcialment juntament amb la geometria de la representació 3D.

Exemple de visualització 3D d'aspecte realista. Font: http://www.program-ace.com/3d/showcase/virtual_3d_cities/
Funcionalitat de SIG 3D
La funcionalitat dels SIG 3D va més enllà de la simple visualització. Ara com ara, però, la majoria de sistemes ofereixen poc més que visualització, que per la seva espectacularitat constitueix un dels principals reclams de l'ús de representacions 3D. Entre les operacions que permeten considerar un SIG tridimensional com a tal cal considerar especialment les de consulta i selecció, les de caracterització espacial (càlcul de volums, àrees, orientació, etc.) i les d'intersecció i relacions topològiques. Raper and Kelk (1991) i Raper (2000) ofereixen una comparativa quant a la facilitat i rapidesa d'aquestes operacions utilitzant representacions d'embolcall amb reconeixement explícit d'objectes i topologia o bé representacions discretes com els vòxels. En general, tret de les operacions topològiques d'intersecció i relació, que aprofiten l'avantatge que en les representacions d'embolcall aquesta informació ja és explícita, la majoria d'operacions són molt més senzilles d'implementar i ràpides d'executar en la representació mitjançant vòxels.
Temes relacionats
- Bases de dades espacials
- Generalització
- Model de dades ràster
- Model de dades vectorial
- Model digital d'elevacions
- Simple Feature Access
- Sistemes d’informació geogràfica
- Superfície
Referències
Bak, P. and Mill, A. (1989) "Three Dimensional representation in a Geoscientific Resource Management System for the minerals industry", in Raper, J. (ed.) Three Dimensional Applications in Geographical Information Systems. London: Taylor & Francis.
Batten, L.G. (1989) "National capital urban planning project: development of a 3-D GIS", Proceedings of GIS/LIS'89. Falls Church, Virginia: ACSM/ASPRS.
Breunig, M. and Zlatanova, S. (2011) "3D geo-database research: Retrospective and future directions", Computers & Geosciences, 37, 7, 791-803.
ESRI (2008) The Multipatch Geometry Type. ESRI White Paper. Redlands, California: Environmental Systems Research Institute, Inc.
Fisher, T. and Wales, R.Q. (1991) "3-D solid modelling of geo-objects using non-uniform rational B-splines (NURBS)", in Turner, A.K. (ed.) Three Dimensional Modelling with Geoscientific Information Systems. Dordrecht: Kluwer.
Kelk, B. (1991) 3-D GIS for the geosciences. Computers and Geosciences, 17.
Kelk, B. and Challen, K. (1990) "Experiments with a CAD package for spatial modelling of geoscientific data", Proceedings of International Colloquium on Digital Maps in the Geosciences.
Mäntyla, M. (1988) An introduction to solid modelling. New York: Computer Science Press.
Petrie, G. and Kennie, T. (1990) (eds.) Terrain Modelling in Surveying and Civil Engineering. Latheronwheel: Whittles.
Pixar (1988) Renderman Interface. San Rafael, California, Pixar Inc.
Raper, J. (1989) (ed.) Three Dimensional Applications in Geographical Information Systems. London: Taylor & Francis.
Raper, J. (2000) Multidimensional Geographic Information Science. London: Taylor & Francis.
Raper, J. and Kelk, B. (1991) "Three-dimensional GIS" in Maguire, D.; Goodchild, M. and Rhind, D.W. (eds.) Geographical Information Systems. Principles and Applications, Harlow: Longman.
Requicha, A.A.G. (1980) "Representations for rigid solids: theory, methods and systems", ACM Computing Surveys, 12, 4, 437-464.
Requicha, A.A.G. and Rossignac, J.R. (1992) "Solid modelling and beyond", IEEE Computer Graphics and Applications, 12, 5, 31-44.
Stoter, J. and Zlatanova, S. (2003) "3D GIS where are we standing?", Joint Workshop on Spatial, Temporal and Multi-Dimensional Data Modelling and Analysis, Quebec, Canada.
Slingerland, R. and Keen, T.R. (1990) "A numerical study of storm driven circulation and 'event bed' genesis", Proceedings of Symposium on Three Dimensional Computer Graphics in Modelling Geologic Structures and Simulating Processes. Freiburger Geowissenschafli­che Beitrage, 2, 97-99.
Turner, A.K. (1989) "The role of 3-D GIS in subsurface characterisation for hydrogeological applications", in Raper, J. (ed.) Three Dimensional Applications in Geographical Information Systems. London: Taylor & Francis.
Youngmann, C. (1989) "Spatial data structures for modelling subsurface features" in Raper, J. (ed.) Three Dimensional Applications in Geographical Information Systems. London: Taylor & Francis.
Lectures recomanades
Abdul-Rahman, A. and Pilouk, M. (2007) Spatial Data Modelling for 3D GIS. Berlin: Springer.
Raper, J. (2000) Multidimensional Geographic Information Science. London: Taylor & Francis.
Stoter, J. and Zlatanova, S. (2003) "3D GIS where are we standing?", Joint Workshop on Spatial, Temporal and Multi-Dimensional Data Modelling and Analysis, Quebec, Canada.
