
 Contacte
Contacte




Autor: Dr. Joan Nunes. Universitat Autònoma de Barcelona
Promotor: Institut Cartogràfic de Catalunya, 2013
L'anàlisi de superfície de cost, o simplement anàlisi de cost, és un conjunt d'operacions d'anàlisi ràster dels sistemes d’informació geogràfica, que tenen per finalitat modelitzar i avaluar el moviment a través de l'espai mitjançant el càlcul del cost o resistència al moviment acumulada en els desplaçaments a través d'una superfície, anomenada superfície de cost o superfície de fricció, que expressa de forma quantitativa la magnitud del cost o dificultat de moviment en l'espai. A partir del cost acumulat les operacions d'anàlisi de superfície de cost permeten calcular el camí de cost mínim per a desplaçar-se d'una o més localitzacions d'origen a una o més localitzacions de destinació a través de la superfície de cost, d'acord amb diferents supòsits i condicions de cost.
L'anàlisi de superfície de cost té aplicacions en àrees molt diverses. En economia i ciència regional permet modelitzar el cost de localització dels factors de producció i de les activitats (Greene, 1991), així com els processos de difusió. En planificació urbana i arquitectura del paisatge, l'anàlisi de superfície de cost s'utilitza per a mesurar l'accessibilitat a serveis o recursos i planificar la localització de noves implantacions (Adriaensen et al., 2003). En enginyeria civil, les aplicacions clàssiques de l'anàlisi de superfície de cost són la determinació del traçat més idoni (més econòmic, de menor dificultat de construcció, etc.) per a la construcció de carreteres, conduccions de transport i distribució com oleoductes, gasoductes o altres, sistemes d'irrigació, o en general d'infraestructures lineals (Yu et al., 2003). També s'utilitza en intel·ligència artificial per als sistemes de navegació de vehicles autònoms (robots) sobre el terreny (Stahl, 2005). En ecologia del paisatge s'utilitza per a determinar connectors biològics entre hàbitats i modelitzar el moviment d'espècies de fauna (Schick et al., 2008; Beier et al., 2009; Richard and Armstrong, 2010). En arqueologia és un mètodes d'anàlisi molt emprat per a determinar el possible traçat de camins entre assentaments humans històrics o prehistòrics (per exemple, Madry and Rakos, 1996; Wheatley and Gillings, 2002; o Gietl at al., 2007, entre molts altres). Finalment l'anàlisi de superfície de cost és un dels components bàsics per a la planificació d'activitats militars.
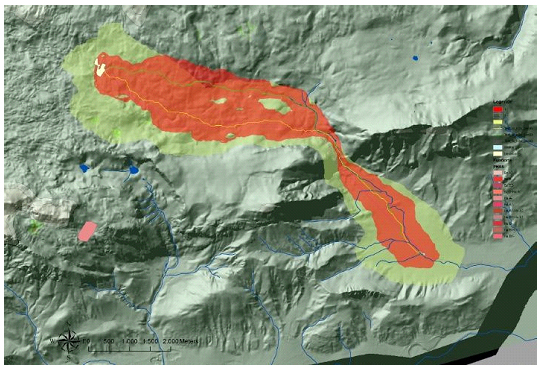
Anàlisi de superfície de cost aplicat a l'arqueologia: camí de cost mínim i corredor entre assentaments prehistòrics en una àrea dels Alps austríacs. Font: Gietl at al., 2007.
Sumari:
- Origen
- Definició
- Operacions d'anàlisi de superfície de cost
3.1 Creació de superfícies de cost
3.2 Distància de cost: superfície de cost acumulat
3.3 Direcció de cost
3.4 Camí de cost mínim
3.5 Assignació per cost mínim
3.6 Determinació de corredors - Tipus d'anàlisi de superfície de cost
4.1 Cost isotròpic
4.2 Cost anisotròpic - Temes relacionats
- Referències
- Lectures recomanades
Origen
L'origen de l'anàlisi de superfície de cost té a veure amb el concepte de fricció de la distància, propi de la teoria econòmica, segons el qual la distància sempre requereix algun tipus d'esforç (temps, energia, diners, etc.) per a superar-la, i en particular dels models de localització i d'interacció d'econometria i de ciència regional, posteriorment adoptats en geografia quantitativa des de finals de la dècada de 1950 (Warntz, 1957).
L'origen de l'operació d'anàlisi ràster d'anàlisi de superfície de cost està relacionat, a més, amb el desenvolupament de les operacions d'anàlisi del terreny aplicades als models digitals d'elevacions, que tingué lloc durant la dècada de 1970, ja que la determinació del camí de cost mínim es considera navegació del terreny i l'algorisme de càlcul a partir de la superfície de cost acumulat és el mateix que el del camí de mínim pendent.
Igualment, en tant que operació d'anàlisi ràster, l'origen de l'anàlisi de superfície de cost es troba també en el mateix desenvolupament de les operacions ràster d'anàlisi cartogràfica, entre mitjans de la dècada de 1960 i mitjans de la de 1970 (Sinton and Steinitz, 1969; Tobler, 1975; Tomlin, 1975; Sinton, 1977), en tant que extensió de l'anàlisi de distància ràster.
Cap a finals de la dècada de 1970 es documenten ja un cert nombre d'algorismes per a l'anàlisi de superfícies de cost (Goodchild, 1977) i és sobretot en la dècada de 1980 (Mitchell, 1988; Eastman 1989) i posteriors que apareixen les versions més sofisticades d'anàlisi de cost isotròpic i anisotròpic (Douglas, 1994; Donnay, 1995; Eastman 1995; Lee and Stucky, 1998; Collischonn and Pilar, 2000; Eastman 2003).
Definició
Una superfície de cost, també anomenada superfície de fricció, és una magnitud de variació contínua, o superfície, que expressa el cost o, en general, la resistència al desplaçament a través de l'espai. Per exemple, una de les variables més habitualment emprades com a superfície de cost és el pendent, ja que tant en els desplaçaments a peu, com en els obstacles a superar en el traçat d'una carretera, és un dels factors que suposa major dificultat per als desplaçaments. No obstant, la superfície de cost pot ser qualsevol altre factor físic o econòmic, i sovint la combinació de diversos factors. Una superfície de cost es representa generalment com un ràster on les cel·les prenen el valor quantitatiu del cost o resistència, que indica la dificultat que trobarà un desplaçament per a travessar cada cel·la.
L'anàlisi de superfície de cost té per finalitat determinar els recorreguts de mínima dificultat a través de la superfície de cost. Aquest resultat s'obté en dos passos: el càlcul de la superfície de cost acumulat, que és necessàriament el punt de partida de qualsevol anàlisi de cost, i el càlcul del camí de cost mínim, basat en l'anterior.
La superfície de cost acumulat és també una superfície, representada per mitjà d'un ràster, que expressa el cost acumulat per a desplaçar-se a través de la superfície de cost des d'una o més cel·les origen fins a cada cel·la. La superfície de cost és un resultat intermedi que constitueix el punt de partida per a qualsevol anàlisi de cost mínim. Lògicament, la superfície de cost acumulat és específica per a cada cel·la o conjunt de cel·les origen.
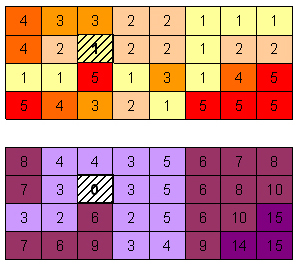
Superfície de cost (a dalt) i superfície de cost acumulat (a baix) a partir d'una cel·la origen determinada.
El camí de cost mínim és el recorregut entre dos punts sobre una superfície de cost que té el cost de desplaçament acumulat més baix. El camí de cost mínim es calcula, com a recorregut de mínim pendent sobre la superfície de cost acumulat. Un dels extrems (origen o destinació) del camí de cost mínim ha de ser necessàriament l'origen de la superfície de cost acumulat.
Superfície de cost acumulat (esquerra) i camí de cost mínim (dreta).
Operacions d'anàlisi de superfície de cost
Les dues operacions bàsiques d'anàlisi de superfície de cost són el càlcul de la superfície de cost acumulat i el càlcul del camí de cost mínim. A més d'aquestes dues operacions bàsiques, es pot calcular la direcció de cost i l'assignació per cost mínim. Prèviament és necessari crear la superfície de cost, que tot i no ser una operació d'anàlisi de cost en si, forma part de la seqüència d'anàlisi i té efectes crítics en el resultat de la resta d'operacions.
Creació de superfícies de cost
La creació de la superfície de cost és el pas més crític de l'anàlisi de superfície de cost. La superfície de cost es crea mitjançant la selecció, ponderació i combinació de diversos factors que reflecteixin adequadament la dificultat de desplaçament per al tipus de moviment o procés objecte de modelització. Inevitablement la selecció i ponderació dels factors és una decisió de l'investigador o professional que realitza l'anàlisi i per tant té un fort component subjectiu.
La selecció, ponderació i combinació dels factors que defineixen la superfície de cost es realitza per mitjà de les operacions bàsiques de geoprocessament ràster, com és ara la reclassificació i la superposició ràster.
Entre els factors més utilitzats per a definir el cost hi ha el pendent, els usos del sòl i la hidrografia. El pendent és una magnitud quantitativa que es pot utilitzar directament com a cost, però pot ser que la influència en la dificultat de desplaçament no sigui lineal i que calgui per tant reclassificar el pendent en intervals segons dificultat de desplaçament. Els usos del sòl, en canvi, són categories que cal reclassificar per agrupar els usos del sòl que suposen un mateix grau de dificultat o de resistència al desplaçament, i que cal valorar per assignar una puntuació numèrica a cada grup d'usos del sòl que indiqui el grau de dificultat. La hidrografia se sol emprar per a establir barreres; és a dir posicions de molt alta resistència al desplaçament. En cas d'introduir barreres, cal introduir també passos (per exemple, pots o guals en el cas dels rius) per tal de modelitzar de forma realista les condicions del terreny. Finalment, si s'utilitza més d'un factor, cal reescalar tots els factors en un mateix rang de valors (per exemple, de 0 a 10), per tal que siguin comparables, i assignar a cada factor un pes expressiu de la seva influència més o menys alta en el cost de desplaçament i combinar tots els factors multiplicats pel seu pes relatiu.
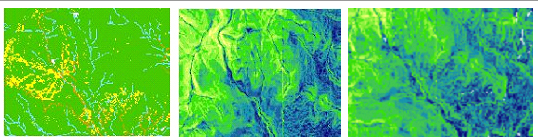
Creació d'una superfície de cost: a) usos del sòl reclassificats i valorats de 0 a 10; b) pendent reescalat de 0 a 10; c) superfície de cost final resultant de combinar els usos del sòl i el pendent.
Distància de cost: superfície de cost acumulat
El càlcul de la distància de cost, o distància ponderada pel cost, és el càlcul de la superfície de cost acumulat. Utilitzant un ràster de superfície de cost i un segon ràster amb les cel·les origen de desplaçaments, el càlcul de la distància de cost genera un ràster en el qual cada cel·la té un valor que és el cost acumulat més baix per a desplaçar-se des de la cel·la origen més pròxim fins a la cel·la. Convé notat, per tant, que el càlcul del cost acumulat actua sempre amb el criteri de calcular el desplaçament de menor cost possible entre cada cel·la i les veïnes per a determinar el mínim cost acumulat. Hi ha diversos algorismes per al càlcul del cost acumulat mínim. Un dels més emprats és una adaptació a la topologia ràster de l'algorisme de Dijkstra (Dijkstra, 1959), propi de l'anàlisi de xarxes, que calcula el camí de cost mínim entre posicions al llarg d'una xarxa lineal.
La superfície de cost acumulat indica la distància de cost mínima entre cada cel·la i la cel·la origen de desplaçament més propera, però no dóna idea de quin és el recorregut a seguir per aconseguir aquest cost acumulat mínim. Per a determinar el camí de cost mínim corresponent al cost acumulat de cada cel·la de la superfície de cost acumulat es necessita la direcció de cost, o direcció ponderada pel cost, que consisteix en un ràster que indica per a cada cel·la del ràster de cost acumulat quina de les cel·les veés és la cel·la més propera a través de la qual s'ha de fer el desplaçament per a obtenir el mínim cost acumulat.
El camí de cost mínim és el conjunt de cel·les entre una cel·la origen i una cel·la destinació que cal recórrer en seqüència per obtenir el mínim cost acumulat. El resultat del càlcul de camíns de cost mínim és, doncs, un ràster amb aparença d'elements lineals. Per a calcular el camí de cost mínim es necessiten tant el ràster de distància de cost com el de direcció de cost, a més d'un tercer ràster que defineixi les cel·les de destinació. Les cel·les d'origen ja estan implícites en els ràsters de distància i de direcció de cost que s'han calculat precisament en funció d'aquests orígens.
Els programes de SIG calculen, per tant, distància i direcció de cost alhora i és opcional el fet d'emmagatzemar una, l'altra o les dues com a resultats intermedis.
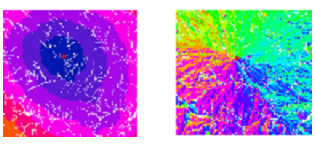
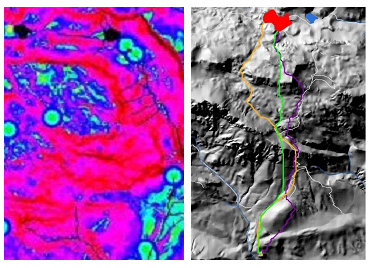
Distància de cost (esquerra) i direcció de cost (dreta).
L'assignacióper cost mínim és una operació addicional, a part, del càlcul del camí de cost mínim, que assigna cada cel·la del ràster a la cel·la origen més propera en funció del cost mínim acumulat. El resultat és el repartiment de l'espai en àrees de proximitat relatives a cada un dels orígens, en el ben entès que la proximitat en aquest cas és en distància de cost. Per tal de realitzar l'assignació per cost mínim, cal disposar de la distància de cost i de la direcció de cost.
La determinació de corredors genera "àrees" (conjunts de cel·les contigües) entre diverses destinacions, com a resultat de sumar els ràsters de distància de cost (cost acumulat mínim) per a cada destinació, calculats separadament. El resultat, en lloc d'un camí de cost mínim, és tota una àrea de cost mínim entre les dues destinacions, que inclou els camins mínims des de cada una de les destinacions a un origen comú. La determinació de corredors és una operació d'anàlisi de superfície de cost especialment útil per a aplicacions de connectivitat ecològica entre hàbitats o espais naturals.
Un cop obtinguda la suma de les superfícies de cost acumulat de les diverses destinacions, les "àrees" corresponents als corredors es poden aïllar reclassificant el cost acumulat per sota d'un determinat llindar. En cas d'haver calculat les diverses superfícies de cost acumulat de les diverses destinacions utilitzant múltiples orígens comuns, el resultat pot donar lloc a múltiples corredors entre les destinacions.
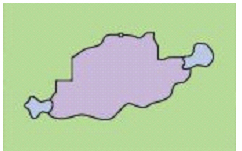
Corredor entre dues destinacions, determinat per un punt d'origen en comú.
Tipus d'anàlisi de superfície de cost
L'anàlisi de superfície de cost bàsica té en compte només el cost i assumeix una dificultat de desplaçament igual en totes direccions excepte pel diferent valor de cost en cada punt de la superfície de cost. Aquest tipus d'anàlisi, simple, es coneix com anàlisi de superfície de cost isotròpic, ja que el cost actua igual en totes direccions. L'anàlisi de superfície de cost isotròpic s'anomena també anàlisi de cost en pla.
L'anàlisi de superfície de cost anisotròpic és una forma més complexa d'anàlisi de superfície de cost, que té en compte la diferent influència del cost en les diferents direccions com a conseqüència del sentit diferent que té el cost en cada direcció. Per exemple, una anàlisi de superfície de cost que utilitzi el pendent com a superfície de cost i només es basi en el valor de pendent que hi ha en cada cel·la és una anàlisi de superfície de cost isotròpic, ja que el pendent actua igual com a dificultat de desplaçament ten totes direccions. En canvi, una anàlisi de superfície de cost que utilitzi el pendent com a superfície de cost i tingui en compte, a més, el sentit amunt o avall del pendent, és una anàlisi de superfície de cost anisotròpic, ja que el pendent no representa la mateixa dificultat de desplaçament quan és de pujada que quan és de baixada. L'anàlisi de superfície de cost anisotròpic s'anomena també anàliside cost en superfície.
Alguns programes, a més d'incorporar l'anàlisi de superfície de cost anisotròpic, permeten modelitzar per separat el factor horitzontal i el factor vertical del cost de desplaçament. Per exemple, el factor horitzontal pot ser la diferent textura o consistència del terreny (més tou o més irregular) o la presència de vents favorables o desfavorables, mentre que el factor vertical pot ser el gradient del pendent.
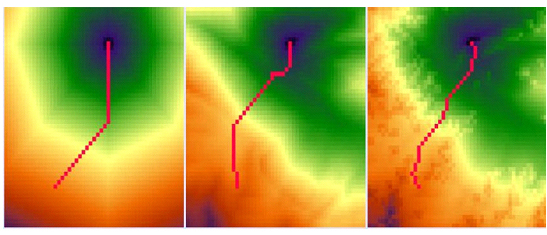
Diferents superfícies de cost i camins de cost mínims corresponents: a) cost isotròpic; b) cost anisotròpic (pendent); c) cost anisotròpic (pendent més usos del sòl). Font: Stahl, 2005.
Temes relacionats
- Anàlisi del terreny
- Model de dades ràster
- Model digital d'elevacions
- Sistema d’informació geogràfica
- Superfície
Referències
Adriaensen, F.; Chardon, J.P.; De Blust, S.G.; Swinnen, E.; Villalba, S.; Gulinck, H. and Matthysen, E. (2003) "The application of ‘least-cost’ modelling as a functional landscape model", Landscape and Urban Planning, 64, 233-247.
Beier, P.; Majka, D.R. and Newell, S.L. (2009) "Uncertainty analysis of least-cost modeling for designing wildlife linkages", Ecological Applications, 19, 2067-2077.
Collischonn, W. and Pilar, J. (2000) "A direction dependent least-cost-path algorithm for roads and canals", International Journal of Geographical Information Science, 14, 4, 397–406.
Dijkstra, E. W. (1959) "A note on two problems in connection with graphs", Numerische Mathmatik, 1, 269-271.
Donnay, J.P. (1995) "Modelling of Accessibility Fields" in Proceedings JEC-GI '95. Amsterdam: IOS Press.
Douglas, D. H. (1994) "Least-cost path in GIS using an accumulated cost surface and slopelines", Cartographica,31, 3, 31-51.
Eastman, J.R., (1989) "Pushbroom Algorithms for Calculating Distances in Raster Grids" in Proceedings, AUTOCARTO 9. Falls Church, Virginia: ASPRS-ACSM.
Eastman, J. R. (1995) Idrisi for Windows Users Guide. Worcester, Massachussets: Clark University.
Eastman, J. R. (2003) Idrisi Kilimanjaro. Guide to GIS and Image Processing. Worcester, Massachussets: Clark University.
Gietl, R.; Doneus, M. and Fera, M. (2007) "Cost Distance Analysis in an Alpine Environment: Comparison of Different Cost Surface Modules" in Layers of Perception – CAA 2007.
Goodchild, M. F. (1977) "An evaluation of lattice solutions to the corridor location problem", Environment and Planning A, 9, 727-738.
Greene, W.H. (1991) Econometrics Analysis. NewYork: Macmillan Publishing Company.
Lee, J. and Stucky, D. (1998) "On applying viewshed analysis for determining least-cost paths on Digital Elevation Models", International Journal of Geographical Information Science, 12, 891–905.
Madry, S. and Rakos, L. (1996) "Line-of-sight and cost surface techniques for regional archaeological research in the Arroux river valley" in Maschner, H.D.G. (ed.) New Methods, Old Problems: Geographic Information Systems in Modern Archaeological Research. Carbondale.
Mitchell, J.S.B. (1988) "An algorithmic approach to some problems in terrain navigation", Artificial Intelligence, 37, 171-201.
Richard, Y. and Armstrong, D.P. (2010) "Cost distance modelling of landscape connectivity and gap-crossing ability using radio-tracking data", Journal of Applied Ecology, 47, 603–610.
Schick, R.S.; Loarie, S.R.; Colchero, F.; Best, B.D.; Boustany, A.; Conde, D.A.; Halpin, P.N.; Joppa, L.N.; McClellan, C.M. and Clark, J.S. (2008) "Understanding movement data and movement processes: current and emerging directions", Ecology Letters, 11, 1338-1350.
Sinton, D.F. and Steinitz, C.F. (1969) GRID: A user's manual, Cambridge, Massachussets: Laboratory for Computer Graphics and Spatial Analysis, Graduate School of Design, Harvard University.
Sinton, D.F. (1977) The user's guide to IMGRID: an information system for grid cell data structures, Cambridge, Massachussets: Department of Landscape Architecture, Graduate School of Design, Harvard University.
Stahl, C.W. (2005) Accumulated Surfaces & Least-Cost Paths: GIS Modeling for Autonomous Ground Vehicle (AGV) Navigation. MSc Thesis. Blacksburg, Virginia: Virginia Polytechnic Institute and State University.
Tobler, W.R. (1975) Cellular Geography. IIASA Working Paper WP-75-l00.
Tomlin, C.D (1975) The Tomlin Subsystem of IMGRID: an information system for grid cell data structures, Unpublished MSc thesis. Cambridge, Massachussets: Department of Landscape Architecture, Graduate School of Design, Harvard University.
Warntz, W. (1957) "Transportation, social physics and the Law of Refraction", The Professional Geographer, 9, 2-7.
Wheatley, D. and Gillings, M. (2002) Spatial Technology and Archaeology. The Archaeological Applications of GIS. London: Taylor and Francis.
Yu, C.; Lee, J. and Munro-Stasiuk, M. J. (2003) "Extensions to Least-Cost Path Algorithms for Roadway Planning. International Journal of Geographic Information Science, 17, 4, 361-376.
Lectures recomanades
DeMers, M. N. (2002) GIS Modeling in Raster. New York: John Wiley and Sons, Inc.
Yu, C.; Lee, J. and Munro-Stasiuk, M. J. (2003) "Extensions to Least-Cost Path Algorithms for Roadway Planning. International Journal of Geographic Information Science, 17, 4, 361-376.
